災害対応工学研究室
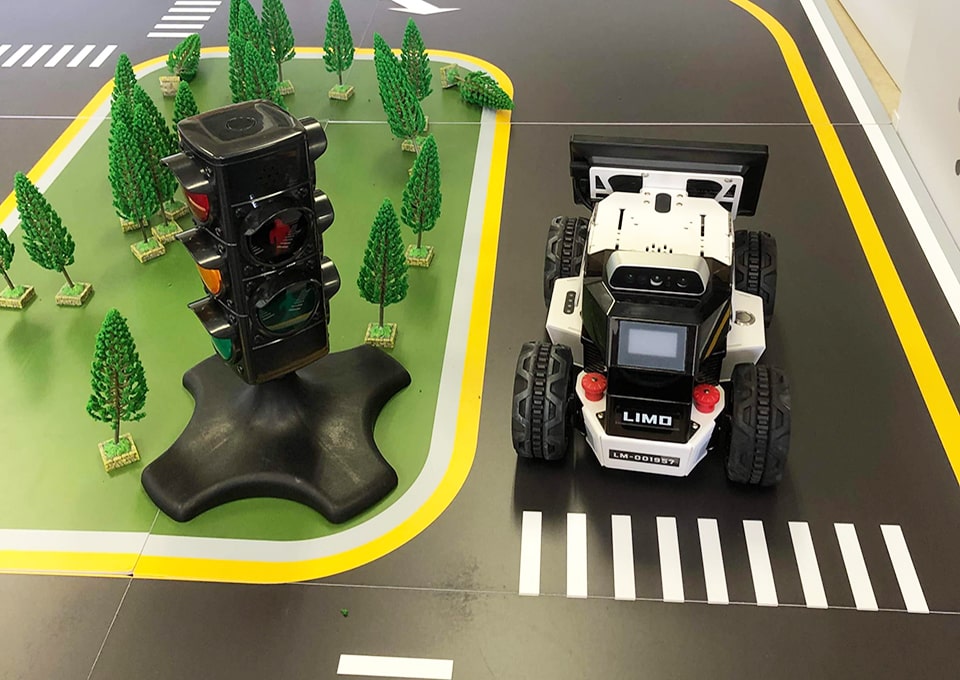
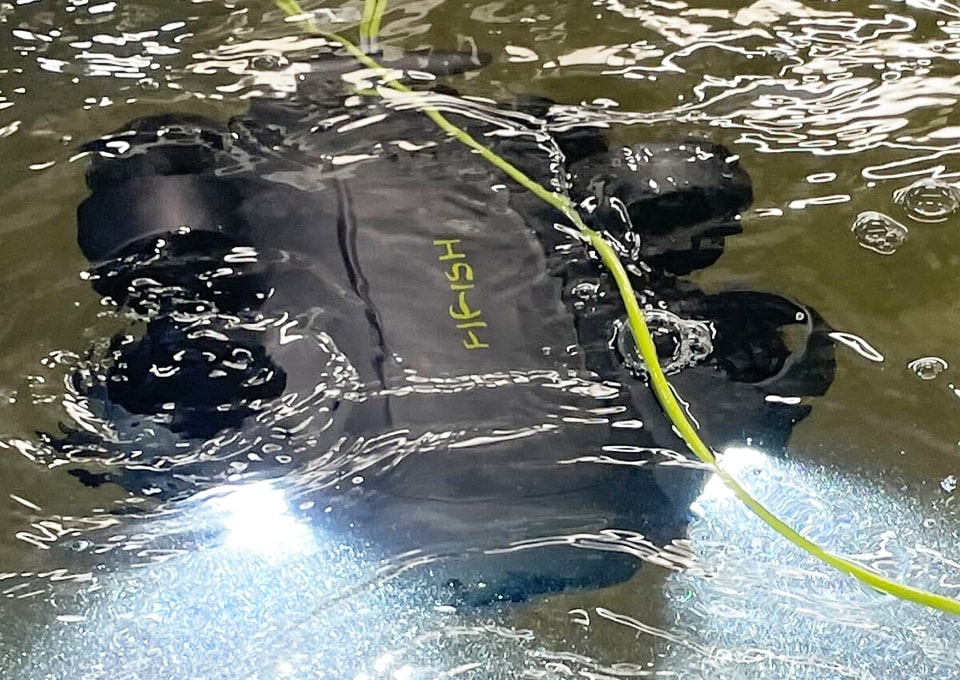
水中ドローン、飛行ドローンの救助活動に必要となる性能に関する研究、走行ロボットの走行機構や自律走行に関する研究を行っています。
- 教授:天野 久徳
研究概要


災害発生時、火災の消火、危険性ガスの除去など災害の拡大を抑制する活動や救助・救出活動を早期に実施する必要があります。しかしながら、災害現場は危険性が高く、消防隊員など人が接近して直接対応ができないこともあります。そこで、人に替わり、災害の拡大を抑制し、救助を行う移動ロボットに必要な制御手法、情報解析、機構に関する研究開発を進めています。災害現場での必要性や災害現場の状況に即した研究を行うために、高松市消防局や香川県消防学校と連携して研究を進めています。研究においては、3Dプリンタを使用した部品作成やコンピューターシミュレーションによるロボットの性能評価も行っています。